赤外線アレイセンサシステムの開発
人検知・熱負荷空調制御の性能向上
キーワード:赤外線アレイセンサ,カルコゲナイドレンズ, 人検知, 熱負荷空調制御
赤外線アレイセンサシステムは,非接触で表面温度分布を計測し,熱画像として表示するとともに,フィードフォワードで空調制御を行うシステムである。この空調制御を我々は,熱負荷空調制御と呼んでいる。また,人の位置を正確に検知することも可能である。この位置情報を利用すれば,様々なアプリケーションに活用できる。今回,製品の適用範囲を広げるため,人検知,熱負荷空調制御の性能を大幅に向上する技術を開発したため報告する。
1.はじめに
アズビル株式会社が,オフィス向けの赤外線アレイセンサシステム(図1)を初めてリリースしてから5年が経過した。その間,展示会場向けの高解像度赤外線アレイセンサのリリースや海外販売への対応など当初から計画されていた開発を行ってきたが,同時に現場からのフィードバックも得られるようになってきた。本稿ではフィードバックから得られたいくつかの課題を紹介するとともに,それらを解決した技術について説明する。
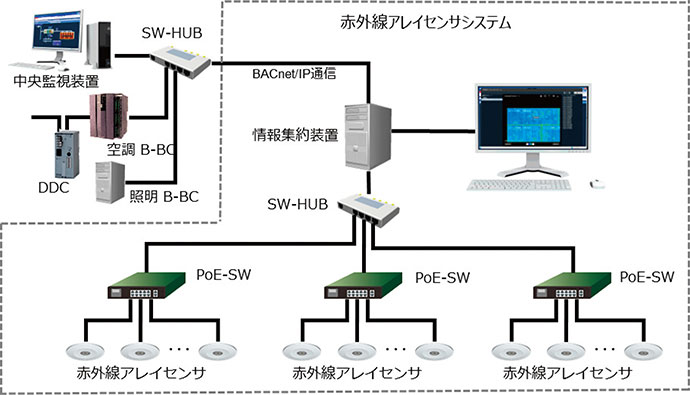
図1 赤外線アレイセンサシステム構成図
今回説明する最初の課題として,図2のようなスケルトン天井(設置高~4m)が流行し,現行のオフィス向け赤外線アレイセンサ(設置高~3mまで人検知可能)で対応できなくなったことが挙げられる。このようなオフィスでは,展示会場向けのセンサを使用するしかなく,高コストとなっていた。
また,2つ目の課題として,個室で赤外線アレイセンサを導入した現場では,人が机に一部隠れてしまって検知できない時間があり,設備を正しく動作させるのが難しいという問題が発生した。
3つ目の課題として,赤外線アレイセンサで計測した表面温度を使用したフィードフォワード空調制御,すなわち熱負荷空調制御は,原理上,室温設定が,主設定(1設定)しか対応できないことが挙げられる。省エネ効果のある冷暖2設定が主流であることから導入できる建物が限られていた。
次章からこれらの課題を解決する技術,カルコゲナイドレンズ,ルールベース,推定室温について述べていく。

図2 スケルトン天井
2.カルコゲナイドレンズの採用
設置高3mまで人検知可能な現行のオフィス向け赤外線アレイセンサを設置高4mまでに対応できるようにし,スケルトン天井で利用できるようにするには,計測ノイズを抑える必要がある。オフィス向けの赤外線アレイセンサで採用しているレンズでは,計測ノイズが大きく,人が映ってもノイズに埋もれてしまい,背景との分離が難しい。センサを高い位置に設置するということは人が小さく映ることになるため,よりノイズに埋もれやすくなる。
他社の類似の製品の中には,ノイズフィルタを用いて人検知を行うものもあるが,それだと移動している人を捉えにくくなる。本製品は,ノイズの除去は最低限にとどめ,移動している人も静止している人も検知できることが大きな特徴になっており,ノイズフィルタ以外の方法で解決を検討した。
ノイズの問題を解決する手段としては,単純に高性能なレンズに変更することが考えられる。しかし,高解像度センサほどではないが,コストが増加してしまう。そこで,レンズの素材を現行のゲルマニウムからカルコゲナイドに変更することにした。
カルコゲナイドレンズは,近年,金型成形により比較的安価に量産できるようになったレンズである。
さらに2重レンズを1重レンズにし,レンズの枚数を減らすことでコストを抑えることにした。しかしながら,1重レンズは,2重レンズより歪みが大きくなってしまう。図3は,レンズの中心からの距離と計測ノイズの特性を示したものである。ゲルマニウム2重レンズは,熱画像中心からの距離に対して,計装ノイズが比較的フラットになっているのが特徴であるのに対して,カルコゲナイド1重レンズは,歪みが大きい影響で,中心から端にかけて計測ノイズの悪化が大きくなっていくのが特徴である。中心付近では,ゲルマニウム2重レンズよりカルコゲナイド1重レンズのほうが,ノイズが低いが,端のほうでは,やや高くなってしまう。これでは設置高4mに設置しても,人が検知できるのは,センサ直下の中央付近だけで,センサから離れた場所で検知できなくなってしまう。結局,すべての視野で検知できるのは,せいぜい3mまでとなってしまう。

図3 レンズと計測ノイズの特性イメージ
この問題に対応するため,設置高に応じて測定範囲を制限することで対処する。

図4 設置高と測定面積
図4は,設置高と測定面積を示したものである。センサの設置が高くなると,視野角が一定であるため測定面積が広がっていく。表1は,現行の赤外線アレイセンサの具体的な設置高と測定範囲を示している。高く設置するほど,測定長,測定面積が大きくなるのがわかる。
表1 現行の赤外線センサの測定範囲
| 設置高[m] | 測定長X[m] | 測定長Y[m] | 測定面積[m²] |
|---|---|---|---|
| 2.5 | 3.0 | 3.0 | 9.0 |
| 2.6 | 3.2 | 3.2 | 10.2 |
| 2.7 | 3.4 | 3.4 | 11.6 |
| 2.8 | 3.6 | 3.6 | 13.0 |
| 2.9 | 3.8 | 3.8 | 14.4 |
| 3.0 | 4.0 | 4.0 | 16.0 |
一方,カルコゲナイドレンズを採用した新しい赤外線アレイセンサの測定範囲を表2に示す。設置高3mまでは,同様に測定範囲が大きくなっていくが,設置高3m以上からは,測定範囲は変わらないように使用する視野角を制限する。
表2 新しい赤外線センサの測定範囲
| 設置高[m] | 測定長X[m] | 測定長Y[m] | 測定面積[m²] |
|---|---|---|---|
| 2.5 | 3.0 | 3.0 | 9.0 |
| 2.6 | 3.2 | 3.2 | 10.2 |
| 2.7 | 3.4 | 3.4 | 11.6 |
| 2.8 | 3.6 | 3.6 | 13.0 |
| 2.9 | 3.8 | 3.8 | 14.4 |
| 3.0 | 4.0 | 4.0 | 16.0 |
| 3.1 | 4.0 | 4.0 | 16.0 |
| 3.2 | 4.0 | 4.0 | 16.0 |
| 3.3 | 4.0 | 4.0 | 16.0 |
| 3.4 | 4.0 | 4.0 | 16.0 |
| 3.5 | 4.0 | 4.0 | 16.0 |
| 3.6 | 4.0 | 4.0 | 16.0 |
| 3.7 | 4.0 | 4.0 | 16.0 |
| 3.8 | 4.0 | 4.0 | 16.0 |
| 3.9 | 4.0 | 4.0 | 16.0 |
| 4.0 | 4.0 | 4.0 | 16.0 |
これにより,設置を高くするほど計測ノイズのより良いところを使用できるようになり,4mの高さでの人検知を可能にすることができた。
スケルトン天井では,実際に設置されるセンサの高さが設計時にわからないことが多く,設置高3mとしてセンサの台数と接地場所を設計するため,設置高3m~4mで16m²以上をカバーする必要はない。
カルコゲナイドレンズを採用した赤外線アレイセンサを試作し(図5),設置高4mで検証を行った。室温を18℃から30℃まで変化させ,オフィスを想定した様々な動作パターンに対して人検知を行った。
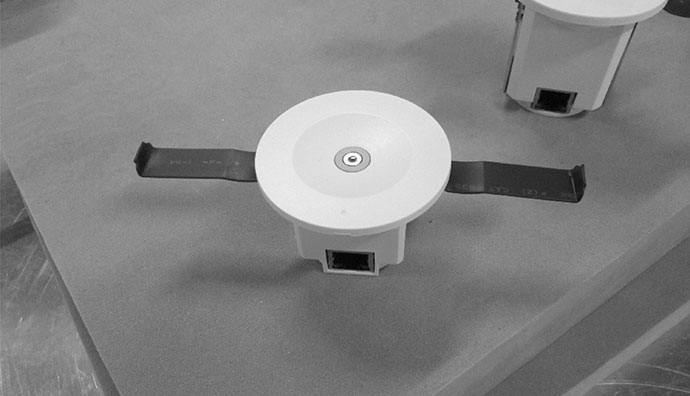
図5 試作した赤外線アレイセンサ
その結果を表3に示す。適合率とは,検知した人が実際に人であった確率である。再現率とは,人が実際にいるところを検知できた確率である。どちらか片方だけ上げるのは容易であり,両方の認識率が高いことが求められる。試作した赤外線アレイセンサが,適合率,再現率ともに良好な結果が得られていることがわかる。
表3 設置高4mでの人検知性能
| 条件 | 認識率 | |
|---|---|---|
| 適合率 | 再現率 | |
| 18℃ | 99.9% | 93.8% |
| 22℃ | 99.9% | 96.8% |
| 26℃ | 100.0% | 98.4% |
| 30℃ | 99.8% | 98.7% |
また,計測ノイズが低くなったことで,得られる熱画像も鮮明になり,室内の発熱体を管理者が確認しやすくなる。例えば,室内の消し忘れた機器などを発見しやすくなる。
図6は,ゲルマニウム2重レンズを用いた現行センサとカルコゲナイド1重レンズを用いた試作センサによる熱画像を示したものである。
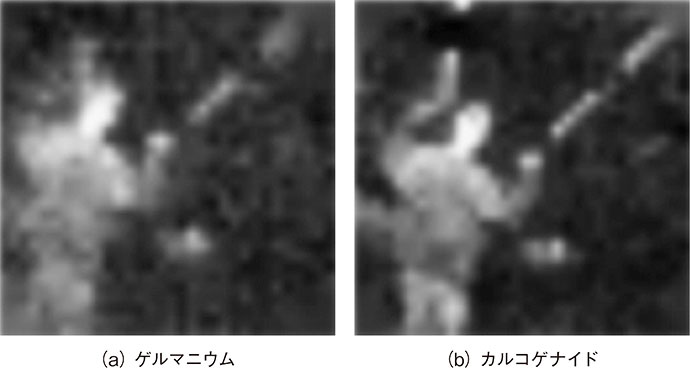
図6 熱画像の比較
2つの熱画像を比較すると人や背景に映る蛍光灯が,カルコゲナイドレンズのほうが鮮明なことがわかる。
3.ルールベースの採用
レンズを交換し,計測ノイズを抑えたとしても,人の一部が机やディスプレイ等の陰に隠れてしまえば,検知は難しくなる。一般的に誤検知しても照明や空調を制御できるよう,オフディレイという仕組みが存在し,赤外線アレイセンサも採用している。オフディレイとは,人が検知されなくなったときに,照明をOFFにしたり,空調の設定値を緩和したりする時間を遅らせることである。しかし,これでは従来狙っていた省エネ効果が得られない場合があるため,なるべく使用は控えていた。
特に個室での使用においては,設定器が近くに見えることが多いため,設定値が緩和されてしまったことに気づきやすく,クレームになることがあった。
そこで,従来の人検知アルゴリズムはそのままにルールを追加することでこの問題に対応することにした。これをルールベースと呼ぶ。
ルールベースとは,1980年代初期の人工知能で用いられた手法として知られている。1990年代以降に機械学習が主流になるまで,熟練した人の知識を再現するエキスパートシステムとして多用されてきた。ルールベースは,「もし~ならば~」といういわゆるIf-thenルールの集合によって構成される。ルールベースは,複雑なことができなかったり,与えたルールから新しいルールを新たに生み出したりといった,いわゆる汎化性能がないなどの問題があったが,単純で人間が理解しやすく実装もしやすいというメリットがある。
今回は課題が明確であるため,機械学習や確率論等で実現される第一の人検知アルゴリズムの結果はそのままに,第2のルールベースでその結果を修正することが有効であると判断した。
従来の人検知アルゴリズムでは,まず,人が部屋に入ってきて,歩いて席にいくまでは,問題なく検知できている。そして席に座ると,体の一部が隠れて検知できなくなる。一部は映っているのでたまに検知されることもある。我々が採用している人検知アルゴリズムの特徴として,人が移動しているときの認識率は,人が着座しているときの認識率より高く,人を見失うことはほとんどない。
そこで,「出入口を経由せずに人がいきなり現れたり消えたりすることはない」ということを次の2つのルールで表現し,この問題を解決する。
<ルール1>
「もし,1つ前の時間の熱画像で検知された人が,現在の熱画像で検知されなかったならば,かつ,もしその場所が事前に登録された出入口でないのならば,その場所にまだ人がいると判断する」
<ルール2>
「もし,現在の熱画像で検知された人が,1つ前の熱画像で検知されてなかったならば,かつ,もしその場所が事前に登録された出入口でないのならば,その場所に人がいないと判断する」
このルールを図7に示す例で考える。①の例では,ルール1が適用され,現在の熱画像でも人がいることにする。④の例では,ルール2が適用され,現在の熱画像には人がいないことにする。②,③はどちらのルールも適用されない。
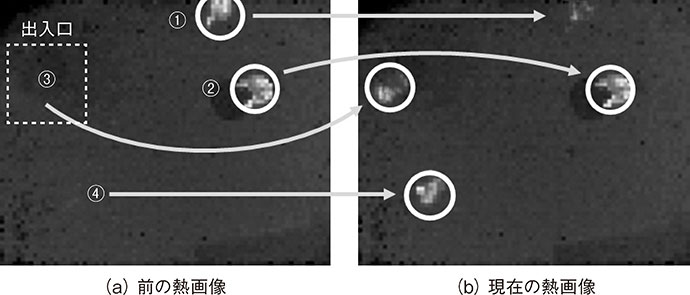
図7 熱画像の比較
表4にルールベース有り無しでの人検知アルゴリズムの認識率を示す。前章でも述べたが,適合率とは検知した人が実際に人であった確率で,再現率とは,人が実際にいるところを検知できた確率である。どちらか一方だけを改善するのは容易である。
表4 ルールベースによる認識率
| ルールベース | 認識率 | |
|---|---|---|
| 適合率 | 再現率 | |
| 無 | 19.20% | 87.40% |
| 有 | 91.70% | 95.70% |
例えば,すべての場所に常に人がいると判断すれば,再現率は100%にすることができる。しかし,適合率は,0%に近くなる。一方,確実なものだけを人と判断した場合,適合率は,100%に近づくが,再現率は0%に近くなる。通常,適合率と再現率のバランスは,人検知アルゴリズムのパラメータで調整できる。そのため,片方だけを見ることに意味はほとんどない。人の在/不在で空調や照明設備のOn/Off制御を行う場合,適合率を重視すれば省エネ性が向上し,再現率を重視すれば快適性が向上することになる。通常は,居住者を不快にすることは避けたいため,両立できなければ,再現率を重視することになる。そのため,表4のルールベース無しでは再現率に重みが置かれた結果,適合率が低くなっている。
ルールベース有りでは,適合率,再現率ともに適用前より高くなっている。特に適合率は,大幅に改善しており,これにより執務者を不快にすることなく省エネを達成できる。
4. 推定室温の採用
熱負荷空調制御は,赤外線アレイセンサが計測する表面温度を使ってフィードフォワード制御を行う独自の空調制御で,高い応答性と省エネ効果を実現する。
しかし,熱負荷空調制御は,室温設定が,原理上,主設定しか対応できないことが課題であった。省エネ効果のある冷暖2設定が主流であることから,熱負荷空調制御が導入できる建物が限られていた。
図8(a)は,主設定方式時の室温制御の振舞いを表したグラフである。設定温度を1つしか持たず,主設定値を挟んで空調による暖房と冷房を繰り返している。
一方,図8(b)が冷暖2設定方式を表したものである。設定温度を2つ持ち,その間を不感帯として空調を行わない。暖房,冷房の繰り返しを抑えて,省エネ効果が期待できるため,冷暖2設定方式のほうが用いられている。
赤外線アレイセンサシステムは,表面温度は計測するが,室温は計測できないため不感帯動作に入る判断が行えない。そこで,表面温度から室温を少ない計算量で簡易的に推定する技術を開発し,フィードフォワード制御でも,冷暖2設定による省エネ効果も得られるようにした。


図8 設定方式による振舞いの違い
理論について説明する。エネルギー保存則により式(1)が与えられる。
ここで,\(C\):空気の比熱(通常1006J/(kg・℃)),\(ρ\):空気の密度(kg/m³),\(V\):部屋の体積(m³),\(W\):給気風量(m³/s),\(T_r\):室温(℃),\(T_s\):給気温度(℃),\(T_{m_x}\):\(x\)番目の面の平均表面温度(℃),\(A_{m_x}\):\(x\)番目の面の面積,\(K_{m_x}\):\(x\)番目の面の対流熱伝達率(W(/ m²・K))となる。
微分方程式を解くのは難しいため,まず定常状態,つまり時間t=∞で安定した状態を考えると,左辺の微分項はゼロとなる。その上で,室温\(T_r\)について式を変形すると式(2)のようになる。
ここでいう室温は,定常状態における室温のため,現在の室温ではない。定常状態に達する時間もわからない。
そこで,部屋の空気が給気で完全に置き換わる時間を,定常状態に到達する時間とすることで,現在の推定室温を求める(式3)。
ここで,\(T’_r\):推定室温(℃),\(t\): 経過時間(s),\(V\):部屋の体積(m³),\(W\):空調機からの給気風量(m³/s),\(T_r\):時刻0で式(2)によって計算された定常状態での室温(℃),\(T_{r0}\):時刻0の際に計算された(=前回最後に計算された)推定室温(℃)となる。
推定室温の検証結果を図9(a)(c)(e)に示す。計測室温と推定室温は,定常状態で最大約1℃の誤差に収まっており,空調制御を行う上で十分な精度であると考えている。計測室温は,壁に取付けられた室温センサであり,推定室温は,空間の平均温度を推定することから,両者は一致するとは限らず,推定温度を用いるほうが執務者の設定値要求を平均的に満たすことができる。計測室温は,近くのOA機器などの発熱に影響をうけて正しい執務者近辺の計測になっていないことがよくある。また,立ち上がり時に,推定温度のほうが,早く設定値に近づいていくが,これは計測室温の時定数が大きいためであり,推定室温の方が優れた室温計測だと考え ている。
推定室温を用いた冷暖2設定方式の検証結果を図9(b)(d)(f)に示す。冷暖2設定方式が正常に動作することが確認できる。また,給気温度のハンチングが抑えられていることがわかる。消費電力も減少していることを確認した。
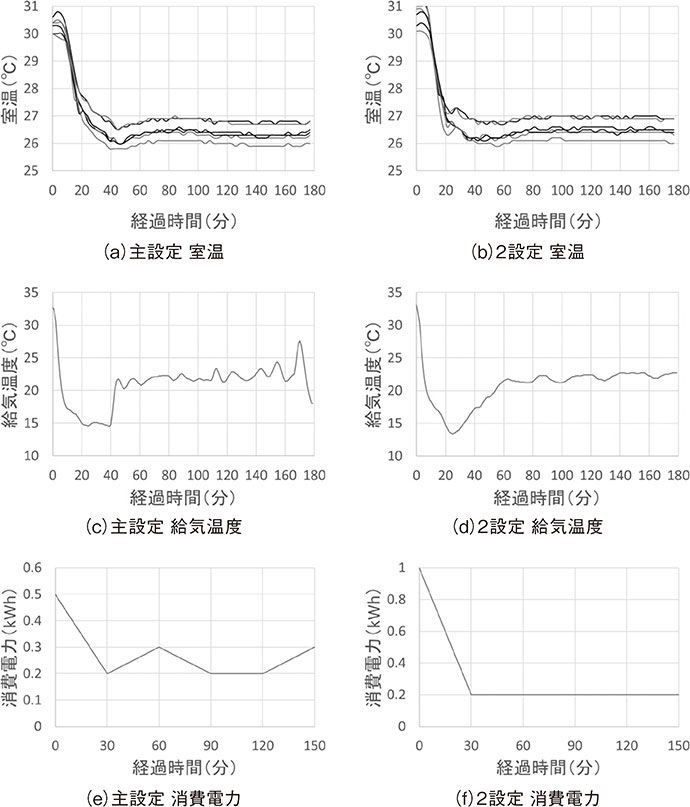
図9 主設定と冷暖2設定の比較
5. おわりに
赤外線アレイセンサの性能を向上させるための技術,カルコゲナイドレンズ,ルールベース,推定温度について説明した。
赤外線センサの技術は日進月歩で発展しており,今後も高性能化,低価格化が進んでいく有望な分野である。この技術の発展に伴って,行動認識などアプリケーションでできることも増えていくだろう。今後,赤外線アレイセンサが,より多くの建物で採用されていけば,価格も今よりも安価になっていくと思われる。室内の表面温度は,室温を決める支配的な要因であるため,赤外線アレイセンサで計測し,監視することは室温の理解に極めて重要であり,これがフィードフォワード制御も可能としている。空調制御の表面の温度計測の重要性はまだ一般的に認知されておらず,本稿を通じて少しでも理解が広まっていけば幸いである。赤外線アレイセンサが未来の建物で欠かせない技術になることは間違いない。アズビルがこの分野で世界をリードしていることを誇りに思う。これからも開発を絶え間なく続け,世界の建物の発展に寄与していきたい。
<参考文献>
(1) 本田光弘, 長嶋聖, 青山章一郎:赤外線アレイセンサ 人を中心としたスマートビルディング実現の基盤技術, a zbil Technical Review, 2020年4月号, pp.3-9, アズビル株式会社
(2) 本田光弘,長嶋 聖,青山章一郎:赤外線アレイセンサシステム,JETI,Vol.68,No.9,2020,pp.70-77, (株)日本出版制作センター
(3) 海老原克司:快適な空調を実現するビル向け赤外線アレイセンサシステム,建築設備と配管工事,Vol.58,No.14,2020,pp.26-30,日本工業出版(株)
(4) 本田光弘,長嶋 聖,青山章一郎,萬谷卓治:赤外線アレイセンサシステム,R&M,pp.39-44,2020年7月,(一社)日本鉄道車両機械技術協会
(5) 青山 章一郎, 本田 光弘, 海老原 克司:特集記事 赤外線アレイセンサシステムとその活用例, 電気設備学会誌 2022年42巻 pp. 417-420, (一社)電気設備学会
(6) アズビル株式会社:製品紹介 スマートビルディングの実現を支援する赤外線アレイセンサシステム, 計測と制御, 2022年61巻8号 pr. 611-612, (公社)計測自動制御学会
<商標>
BACnetは,ASHRAEの商標です。
<著者所属>
本田 光弘 アズビル株式会社 ビルシステムカンパニー開発本部開発2部
この記事は、技術報告書「azbil Technical Review」の2024年04月に掲載されたものです。
- 2024
- 巻頭言:期待
- 特集に寄せて
- DR・VPPのためのリソース割当計画の自動作成
- 新技術を「試し」「議論し」「育てる」ための新実験棟
- 予兆検知・診断技術の開発
- オンライン異常予兆検知システムの大規模プラント向け拡張機能の開発
- 生成AIのアプリケーションへの導入に向けて
- オフィスのABW実装による効果検証法
- SUBLIME: Single-use battery-less wireless temperature sensor for lyophilization process
- 赤外線アレイセンサシステムの開発
- 生産性向上の実現に向けたIO-Link™対応誘導形近接センサ用ICの開発
- savic-net™G5コンパクトモデル
- 空間の価値を高めるsavic-net™ G5 入退室管理システム
- 小型デジタル指示調節計
- 2023
- 2022
- 2021
- 2020
- 2019
- 2018
- 2017
- 2016
- 2015
- 2014
- 2013
- 2012
- 2011
- 2009
- 2008
- 2007
- 2006