>> P.D-134
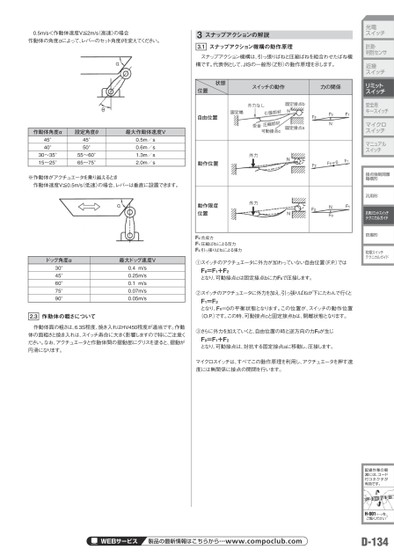
スナップアクション機構の動作原理3.13スナップアクションの解説 作動体面の粗さは、6.3S程度、焼き入れはHV450程度が適当です。作動体の面粗さと焼き入れは、スイッチ寿命に大きく影響しますので特にご注意ください。なお、アクチュエータと作動体間の摺動部にグリスを塗ると、摺動が円滑になります。 0.5M/S<作動体速度V≦2M/S(高速)の場合作動体の角度Αによって、レバーのセット角度Θを変えてください。※作動体がアクチュエータを乗り越えるとき 作動体速度V≦0.5M/S(低速)の場合、レバーは垂直に設置できます。 スナップアクション機構は、引っ張りばねと圧縮ばねを組合わせたばね機構です。代表例として、JISの一般形(Z形)の動作原理を示します。①スイッチのアクチュエータに外力が加わっていない自由位置(F.P.)ではF0=F1+F2となり、可動接点Cは固定接点Bに力F0で圧接します。②スイッチのアクチュエータに外力を加え、引っ張りばねが下にたわんで行くとF1=F2となり、F0=0の平衡状態となります。この位置が、スイッチの動作位置(O.P.)です。この時、可動接点Cと固定接点Bは、開離状態となります。③さらに外力を加えていくと、自由位置の時と逆方向の力F0が生じF0=F1+F2となり、可動接点は、対抗する固定接点Aに移動し、圧接します。マイクロスイッチは、すべてこの動作原理を利用し、アクチュエータを押す速度には無関係に接点の開閉を行います。作動体の粗さについて2.3ドッグ角度Α最大ドッグ速度V30°0.4M/S45°0.25M/S60°0.1M/S75°0.07M/S90°0.05M/S作動体角度Α設定角度Θ最大作動体速度V45°45°0.5M/S40°50°0.6M/S30∼35°55∼60°1.3M/S15∼25°65∼75°2.0M/S位置状態スイッチの動作力の関係自由位置動作位置動作限度位置F0:合成力F1:圧縮ばねによる反力F2:引っ張りばねによる張力配線作業の軽減には、コード付コネクタが有効ですH-001ページをご覧くださいD-134WEBサービス・・・WWW.COMPOCLUB.COM光電スイッチ計測・判別センサ近接スイッチリミットスイッチ安全用キースイッチマイクロスイッチマニュアルスイッチ接点強制開離機構形汎用形汎用リミットスイッチテクニカルガイド防爆形防爆スイッチテクニカルガイド
 | <
| <  |
|  > |
> |  >>
>>